
Eine Drohne, die nicht filmt, misst oder Pakete transportiert, sondern nach oben arbeitet: Der Stuttgarter Erfinder Christoph Kunz verfolgt eine ungewöhnliche Anwendung für Multicopter. Seine Idee: Ein Fluggerät soll Bohrungen an Decken vornehmen oder technische Geräte wie Rauchmelder in hohen, schwer zugänglichen Räumen montieren können.
Das Konzept richtet sich an Einsatzorte, an denen klassische Lösungen aufwendig sind: hohe Industriehallen, Kirchen, Schächte, Tunnel, abgehängte Decken oder Räume, die aus Sicherheitsgründen nicht betreten werden sollen. Dort braucht es heute oft Leitern, Gerüste, Hubsteiger oder Sonderlösungen. Kunz sieht hier ein mögliches Einsatzfeld für einen speziell umgebauten Multicopter.
Werkzeug oberhalb der Drohne
Der Kern der Idee liegt in einer Umkehrung der üblichen Drohnenlogik. Während Kameras, Sensoren oder Transportlasten meist unterhalb einer Drohne angebracht werden, soll bei diesem Konzept das Werkzeug oberhalb des Multicopters sitzen. Ein entsprechendes Gebrauchsmuster wurde bereits 2018 eingetragen. Es trägt die Bezeichnung „Änderung an der Oberseite eines Multicopters zum Einsatz als Werkzeug (z.B. Bohren, Sägen o.ä.)“.
In der Gebrauchsmusterschrift wird ein Modul beschrieben, das auf einer Plattform an der Oberseite des Multicopters angebracht werden kann. Dieses Modul kann unter anderem eine Bohreinheit mit eigenem Motor enthalten. Vorgesehen sind auch Abstandhalter, die ein Berühren der Rotoren mit der Decke verhindern und ein lotrechtes Arbeiten ermöglichen sollen. Ebenfalls erwähnt werden eine mögliche Staubabsaugung, Sensoren sowie Maßnahmen, um dem Drehmoment der Bohreinheit entgegenzuwirken.
Die Idee ist damit nicht auf das Bohren beschränkt. In den Unterlagen werden auch Sägeeinrichtungen, Greifarme und Anwendungen für Leuchten oder andere Gegenstände genannt. Ein weiteres Gebrauchsmuster aus dem Jahr 2024 betrifft eine Vorrichtung zum Ein- und Ausbau von Montageplatten sowie technischen Geräten an Decken, etwa Rauchmeldern, Gasmeldern, Alarmmeldern oder Überwachungskameras.
Vom Gebrauchsmuster zum Demonstrator
Aus der Idee entstand 2022 ein Prototyp. Entwickelt und gebaut wurde die Bohrdrohne MCB-01 von Dr. Christian Molter beziehungsweise Rotors, Drones & More im Auftrag von Christoph Kunz. Laut Sachbericht wurde der Prototyp im Detail konstruiert, inklusive Teileliste, Verkabelungsplan und CAD-Modell. Zur Steuerung des Bohrmechanismus kamen ein kleiner Microcontroller und eine eigens entwickelte Software zum Einsatz.
Der Demonstrator war ausdrücklich noch nicht dafür gedacht, in tragfähige Deckenmaterialien zu bohren. Ziel war zunächst der Machbarkeitsnachweis: Kann ein kleiner Multicopter kontrolliert an eine Decke herangeführt werden und dort mit einem Bohrmodul Löcher in eine Styroporplatte setzen?
Nach Angaben von Kunz wurden bei dem Test mehrere Bohrungen in eine Styroporplatte vorgenommen, die unter einem Treppenpodest angebracht war. Dabei ging es um die Machbarkeit, die Positionierung und den eigentlichen Bohrvorgang.
Auch die vorliegenden Fotos und Screenshots dokumentieren diesen Versuchsaufbau: Zu sehen ist ein Multicopter, der von unten an eine montierte Platte herangeführt wird. Auf weiteren Bildern sind Bohrmarkierungen und Bohrtiefen von rund 28 bis 30 Millimetern vermerkt.
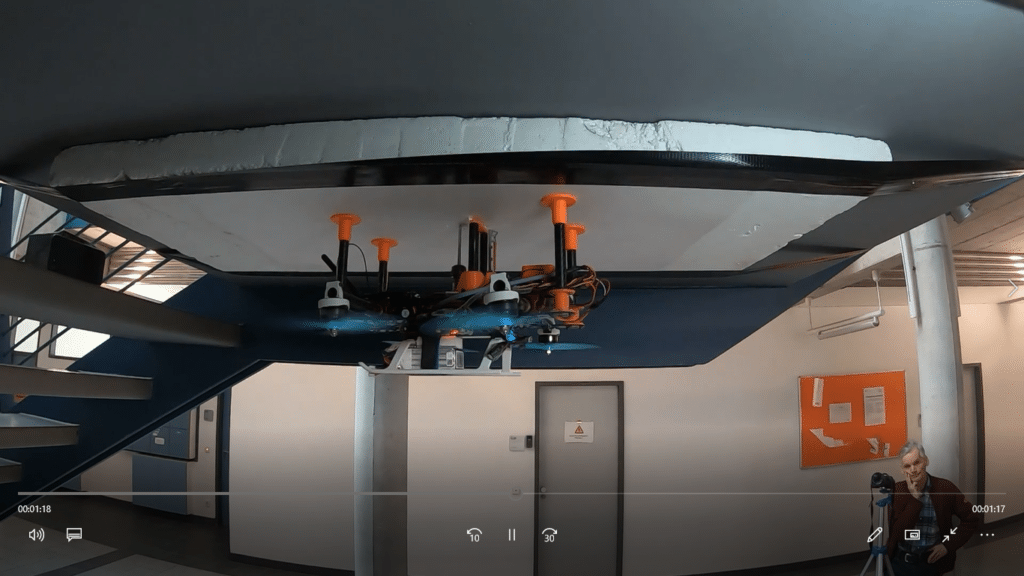
Der Prototyp MCB-01 soll zeigen, ob ein Multicopter mit Bohrmodul kontrolliert an einer Decke arbeiten kann.
Die technischen Hürden
So einfach die Grundidee klingt, technisch ist sie anspruchsvoll. In der Konzeptstudie von Dr. Christian Molter werden drei zentrale Herausforderungen genannt: die Navigation im Raum, das Aufbringen der nötigen Anpresskraft und das Abfangen des Bohrdrehmoments. Ein Multicopter muss also nicht nur an die richtige Stelle fliegen, sondern dort stabil bleiben, den Bohrer mit ausreichender Kraft gegen die Decke drücken und gleichzeitig verhindern, dass sich das Fluggerät durch das Bohrmoment verdreht.
Für einen späteren Einsatz in Holzdecken kommt die Konzeptstudie zu dem Ergebnis, dass ein größerer Multicopter in einer Gewichtsklasse von etwa fünf Kilogramm rechnerisch grundsätzlich geeignet sein könnte. Für Holz oder Kunststoffplatten als Deckenmaterial wurden in der Studie Richtwerte von 100 Newton Schubkraft und einem Drehmoment zwischen 1 und 2 Newtonmetern für Bohrdurchmesser bis 12 Millimeter herangezogen.
Der Demonstrator selbst blieb deutlich kleiner. In der Konzeptstudie ist vorgesehen, dass der erste Prototyp mit 5- bis 6-Zoll-Propellern arbeitet und zunächst nur in Styropor bohrt. Damit sollte die prinzipielle Machbarkeit gezeigt werden, ohne bereits die Anforderungen eines späteren Praxiseinsatzes erfüllen zu müssen.
Eine besondere Herausforderung beschreibt Molter in den Antworten des Erfinders: Die Rotorblätter erzeugen in Deckennähe einen Sog zur Decke. Das sei gewissermaßen das Gegenteil des bekannten Bodeneffekts, bei dem ein Luftpolster unter dem Fluggerät entsteht. Dadurch könne sich der Multicopter ab einem gewissen Abstand schnell an die Decke heranziehen. Die manuell durchgeführten Flüge erforderten deshalb präzises Anfliegen und schnelles Andocken.
Noch kein Produkt, sondern ein Machbarkeitsnachweis
Kunz selbst ist vorsichtig optimistisch. Der Prototyp sei derzeit ein reiner Machbarkeitsnachweis. Eine Lizenzlösung werde angestrebt. Gesucht werden nach seinen Angaben ein Hersteller sowie ein Startup oder Unternehmen, das das Konzept im Rahmen einer Lizenz weiterentwickeln möchte.
Für den Weg zu einem praxistauglichen Produkt wären weitere Entwicklungsschritte nötig. Molter nennt vor allem die Automatisierung der Landung beziehungsweise des Andockens an der Decke. Dafür könnten eine kleine Kamera, ein Zielkreuz auf einem Bildschirm oder eine Markierung an der Decke genutzt werden. Zusätzlich wäre ein Abstandssensor erforderlich, damit das Fluggerät nicht unkontrolliert an die Decke gezogen wird, sondern automatisiert wenige Zentimeter Abstand hält.
Nach Einschätzung Molters wären diese Herausforderungen lösbar, erfordern aber spezialisierte Entwicklungsarbeit in Flugregelung, Sensorik und Software. Als grobe Größenordnung nennt er 6 bis 18 Monate intensive Arbeit durch Fachleute; die Personalkosten eines kleinen Entwicklungsteams lägen demnach im unteren bis mittleren sechsstelligen Bereich.
Einsatzfelder zwischen Gebäudetechnik und Spezialhandwerk
Ob aus dem Demonstrator ein marktfähiges Produkt wird, ist offen. Das Marktpotenzial will Kunz nach eigenen Angaben noch weiter prüfen. Er geht zugleich davon aus, dass viele Betriebe sich den Ablauf des Bohrens mit einem Multicopter bislang schwer vorstellen können.
Naheliegende Einsatzfelder sieht er dort, wo mehrere technische Geräte nacheinander in großen Höhen montiert oder gewartet werden müssen: Rauchmelder, Alarmsysteme, Kameras, Leuchten oder andere Gebäudetechnik. Besonders interessant könnten Orte sein, an denen der Aufbau von Gerüsten oder Hebebühnen teuer, langsam oder baulich schwierig ist.
Gerade darin liegt der Reiz der Idee: Die Bohrdrohne ist kein fertiges Werkzeug für den Handwerksmarkt, sondern ein technischer Ansatz an der Schnittstelle von Drohnentechnik, Gebäudetechnik und Spezialrobotik. Der bisherige Prototyp zeigt, dass sich das Prinzip demonstrieren lässt. Ob daraus ein Produkt wird, hängt nun davon ab, ob sich Partner finden, die die nächsten Entwicklungsschritte finanzieren und technisch umsetzen.
Bild: Christoph Kunz / Dr. Christian Molter.